
Temat wiodący działalności naukowo- badawczej Katedry to
Katedra jest organizatorem cyklicznej (co dwa lata) Międzynarodowej Konferencji Naukowo Technicznej „Technologiczne Systemy Informacyjne w Inżynierii Produkcji i Kształceniu Technicznym”.
Katedra, w ramach kierunku Mechanika i Budowa Maszyn, organizuje studia I i II stopnia, stacjonarne oraz niestacjonarne - na module Informatyczno - Metrologicznym.
W ramach Studenckiego Koła Naukowego Robotyzacji i Zastosowań Informatyki organizowanych jest szereg wyjazdów na konferencje i seminaria naukowe w Polsce oraz za granicą. Referaty oraz prace dyplomowe studentów były niejednokrotnie nagradzane dyplomami I, II i III stopnia. W Katedrze funkcjonuje również drugie Studenckie Koło Naukowe - Inżynierii Biomedycznej.
Laboratoria - pracownie w Katedrze Informatyzacji i Robotyzacji Produkcji
W Katedrze powstało szereg stanowisk naukowo - badawczych wśród nich należy wyróżnić:


![]()








![]()

![]()

Zawiera:
Stanowisko umożliwia wykonywanie ćwiczeń kształcących umiejętności programowania sterowników PLC oraz przygotowanie do pracy w środowiskach programistycznym według standardów obecnie wykorzystywanych w przemyśle.
Jest to wirtualne środowisko procesów do nauki programowania regulacji i sterowników PLC - 3 licencje. Interaktywny system treningowy do nauki programowania regulacji i sterowników PLC, wykorzystuje technologię 3D ITS PLC Professional Edition.
System umożliwia symulację rzeczywistych procesów regulacji występujących w przemyśle, w jego skład wchodzą między innymi sortownia, mieszalnik, paletyzarka, maszyna pakująca, magazyn automatyczny. Umozliwia symulację awarii czujników oraz elementów wykonawczych.
Do wymiany informacji między sterownikiem PLC a komputerem jest wykorzystywany konwerter I/O z separowanymi kanałami oraz interfejs USB. System umożliwia współpracę ze sterownikami wszystkich znaczących producentów sterowników.
Zawiera przenośnik taśmowy z silnikiem krokowym i możliwością płynnej regulacji prędkości przesuwu przenośnika - 2 zestawy
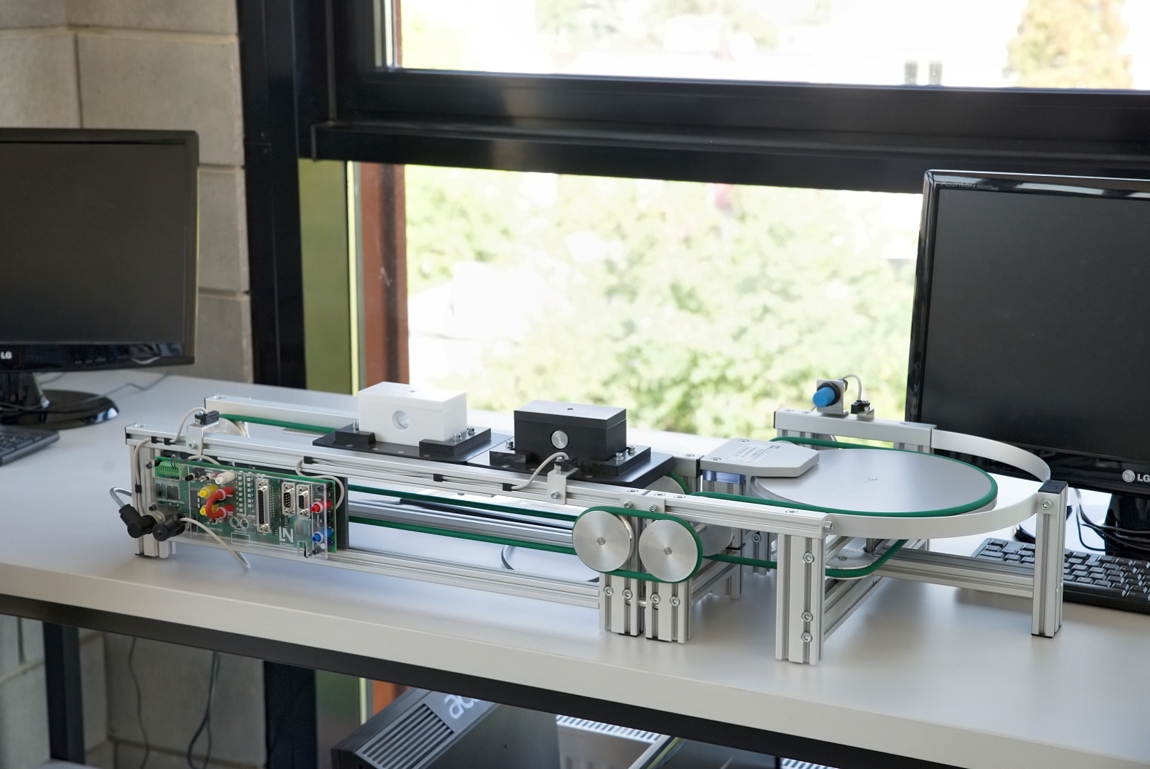
Segment przenośnika taśmowego z tarczą obrotową do łączenia systemów częściowych i do budowy złożonych systemów mechatronicznych oraz systemów obiegowych
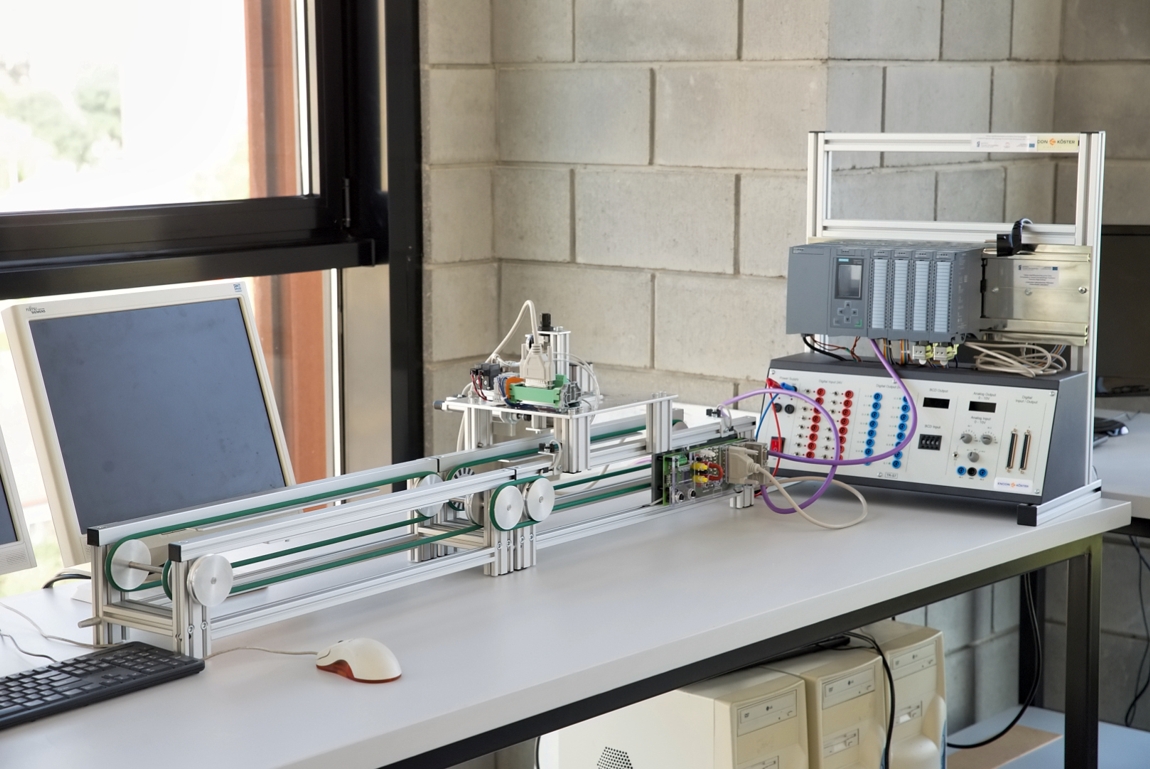
Trenażer szkoleniowy z zestawem SIEMNS S7-1500 do montażu montaż sterowników oraz innych urządzeń automatyki
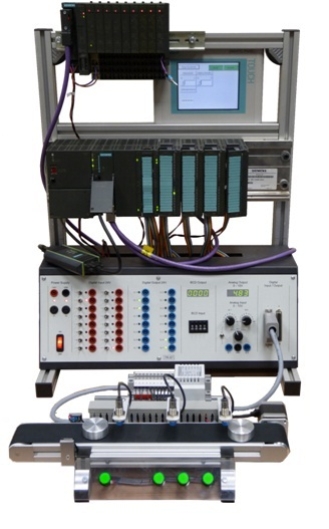
Zestawy trenażerów sterowników SIEMENS S7-1200 wraz z oprzyrządowaniem

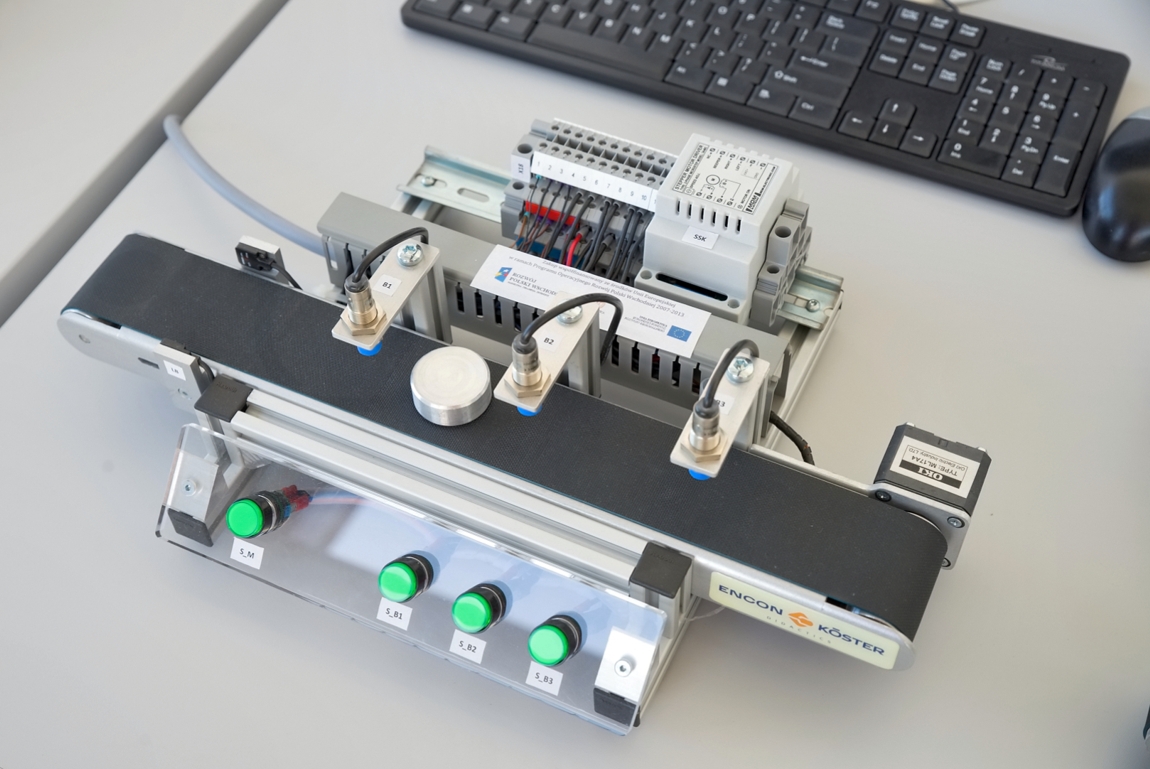
Przenośnik taśmowy
Zawiera
Umożliwia:
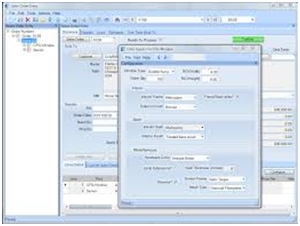

System Epicor ERP - realizacja zadań
Robot dwuramienny irb 14000-yumi został zaprojektowany, aby spełnić potrzeby produkcyjne wymagane do montażu małych części w przemyśle elektronicznym. Jest również dostosowany do montażu zegarków, zabawek i komponentów samochodowych. Wszystko to dzięki podwójnym ramionom, elastycznym rękom, uniwersalnemu systemowi podawania części oraz lokalizacji części opartej na kamerze i nowoczesnemu sterowaniu ruchem. YuMi jest bardzo precyzyjny i szybki, powracając do tego samego punktu w przestrzeni z dokładnością do 0,02 mm i porusza się z maksymalną prędkością 1 500 mm/s. Zapewnia to bezpieczeństwo na liniach produkcyjnych. Robot może efektywnie pracować z ludzkimi współpracownikami. Oprogramowanie i algorytmy czasu rzeczywistego wyznaczają bezkolizyjną ścieżkę dla każdego ramienia.

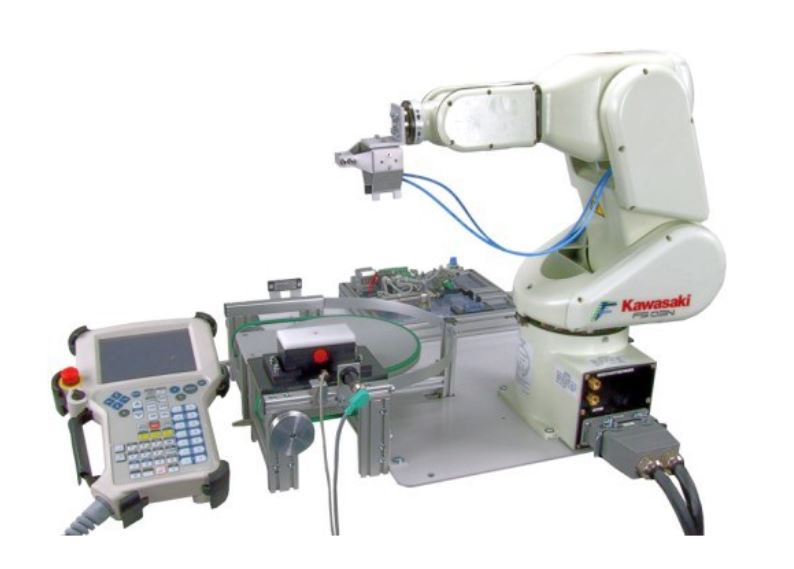
Stanowisko wyposażone jest w robota przemysłowego Kawasaki RS003N (6 stopni swobody, udźwig 3kg,zasięg 620 mm). Robot ten znajduje zastosowanie w procesach paletyzacji, transportu, obsłudze maszyn oraz inspekcji z użyciem systemów wizyjnych. Charakteryzuje się lekkością, a także dużą szybkością pracy.
Wykorzystanie oprogramowania K-ROSET umożliwia przeprowadzenie badań oraz analiz w dowolnym systemie wytwórczym. Zbadać można m.in. zagrożenie wystąpienia kolizji, optymalne umiejscowienie robota w gnieździe produkcyjnym, czas pracy robota oraz dokonać analizy trajektorii chwytaka robota. Dane uzyskane z symulacji mogą posłużyć także w procesie kalkulacji opłacalności wdrożenia robota w konkretnym przedsiębiorstwie produkcyjnym.

Ramię robota Kawasaki RS003N
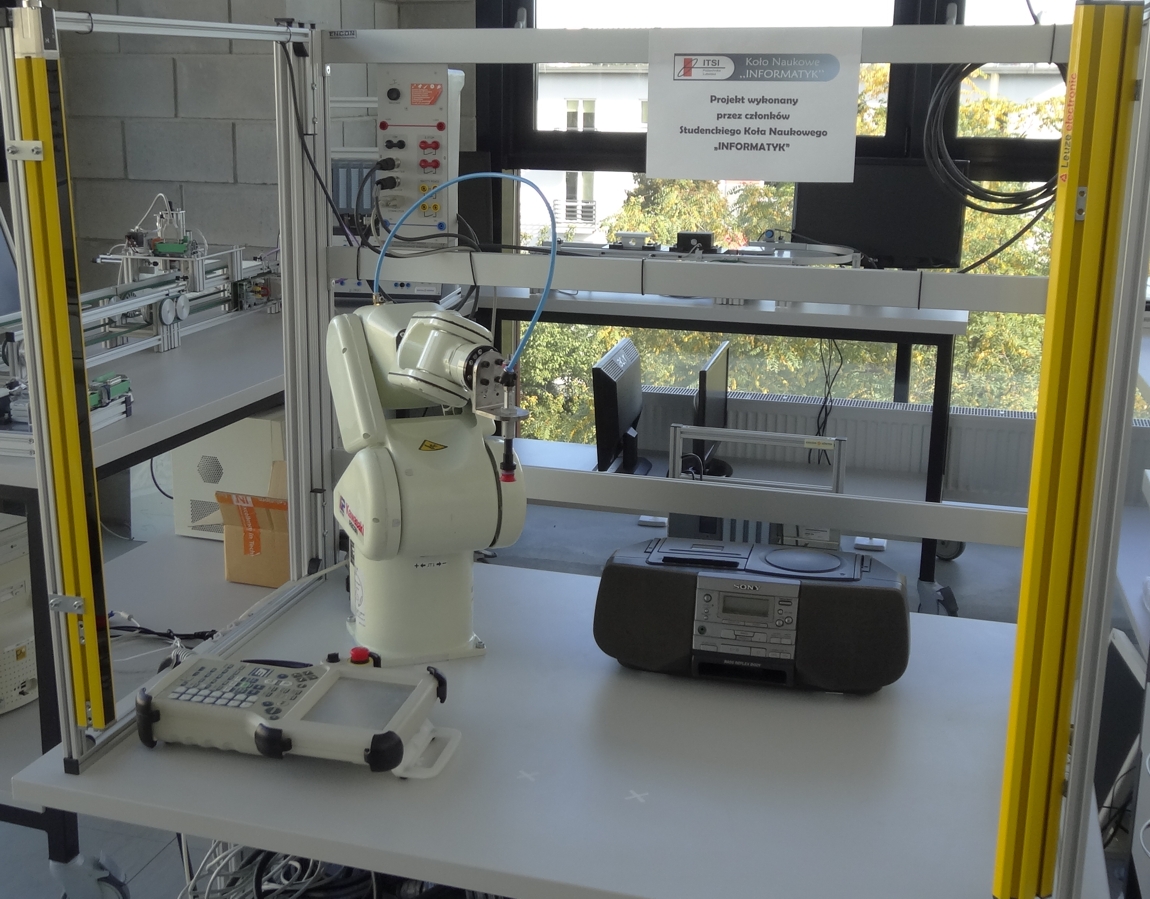
Ogólny widok stanowiska robotyki wraz z barierami bezpieczeństwa
Zawiera zestaw urządzeń: pneumatyki, elektropneumatyki, hydrauliki i elektrohydrauliki wraz z oprogramowaniem do projektowania i symulacji układów pneumatycznych i elektropneumatycznych - oraz regulacji proporcjonalnej napędów elektropneumatycznych.
Oprogramowanie symulacyjne umożliwia m.in.:
Oprogramowanie zawiera również bibliotekę prezentacji i materiałów dydaktycznych przedstawiających zasadę działania poszczególnych elementów składowych układów. Możliwa jest rejestracja danych pochodzących z symulacji, prezentacja ich zmian na wykresach oraz ich archiwizacja.
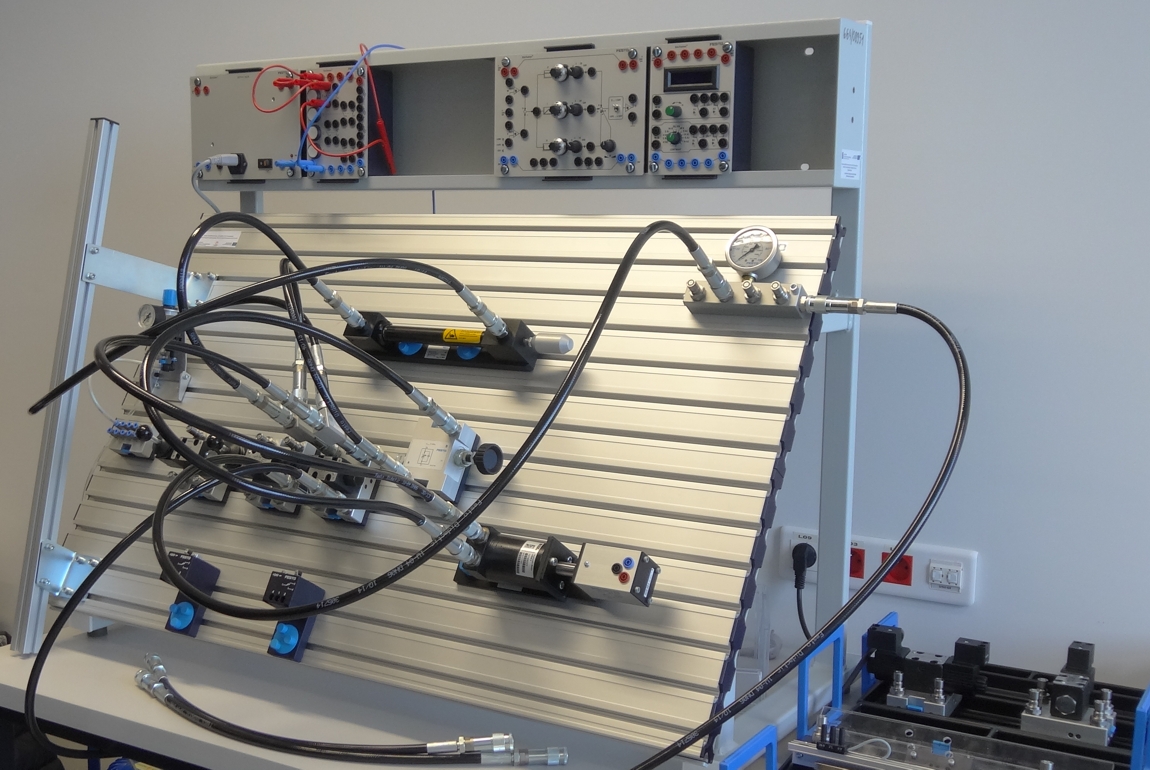
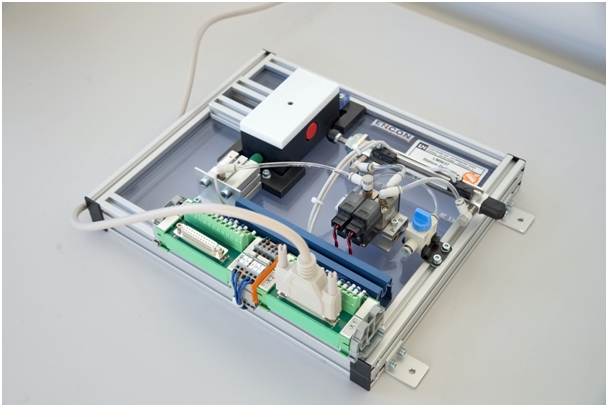
Mocowanie elementów składowych układu hydraulicznego
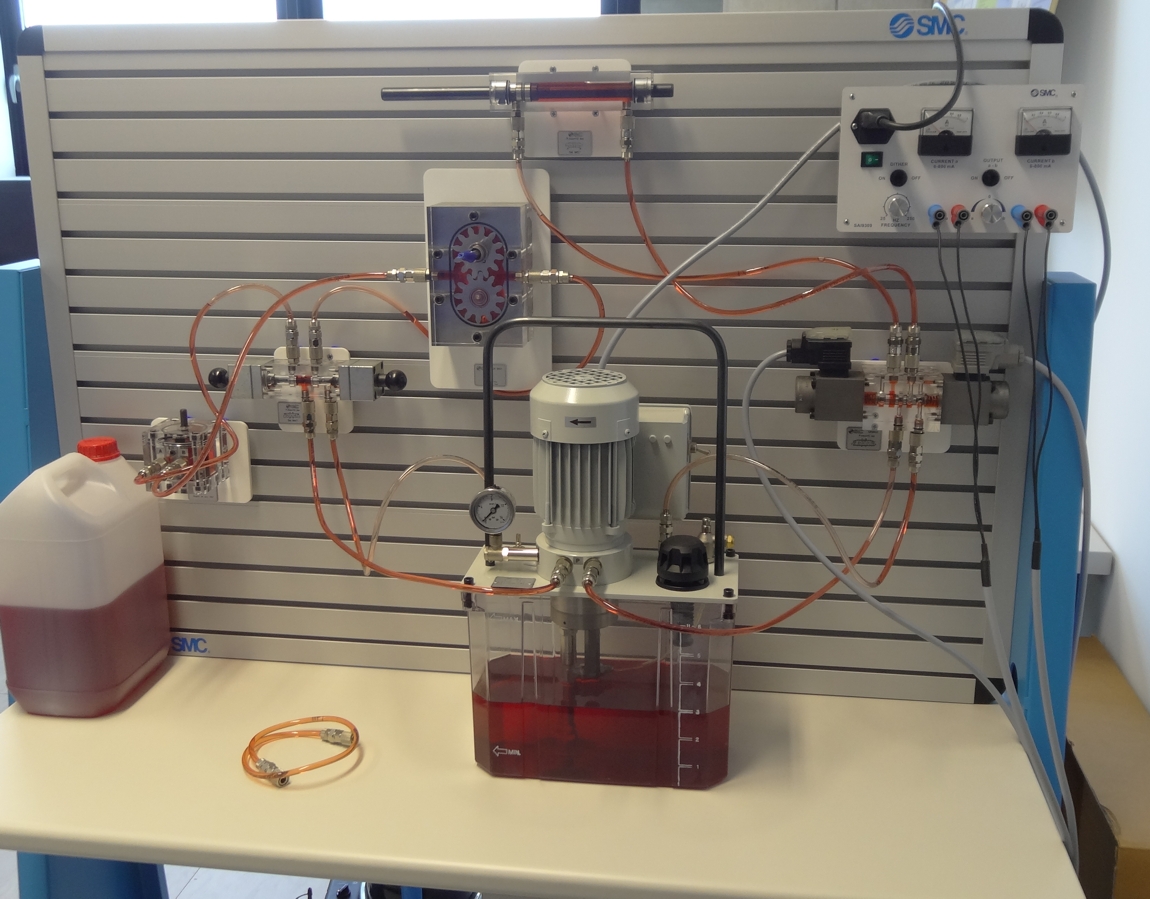
Stanowisko pokazowe firmy SMC do demonstracji zasady działania układów hydraulicznych
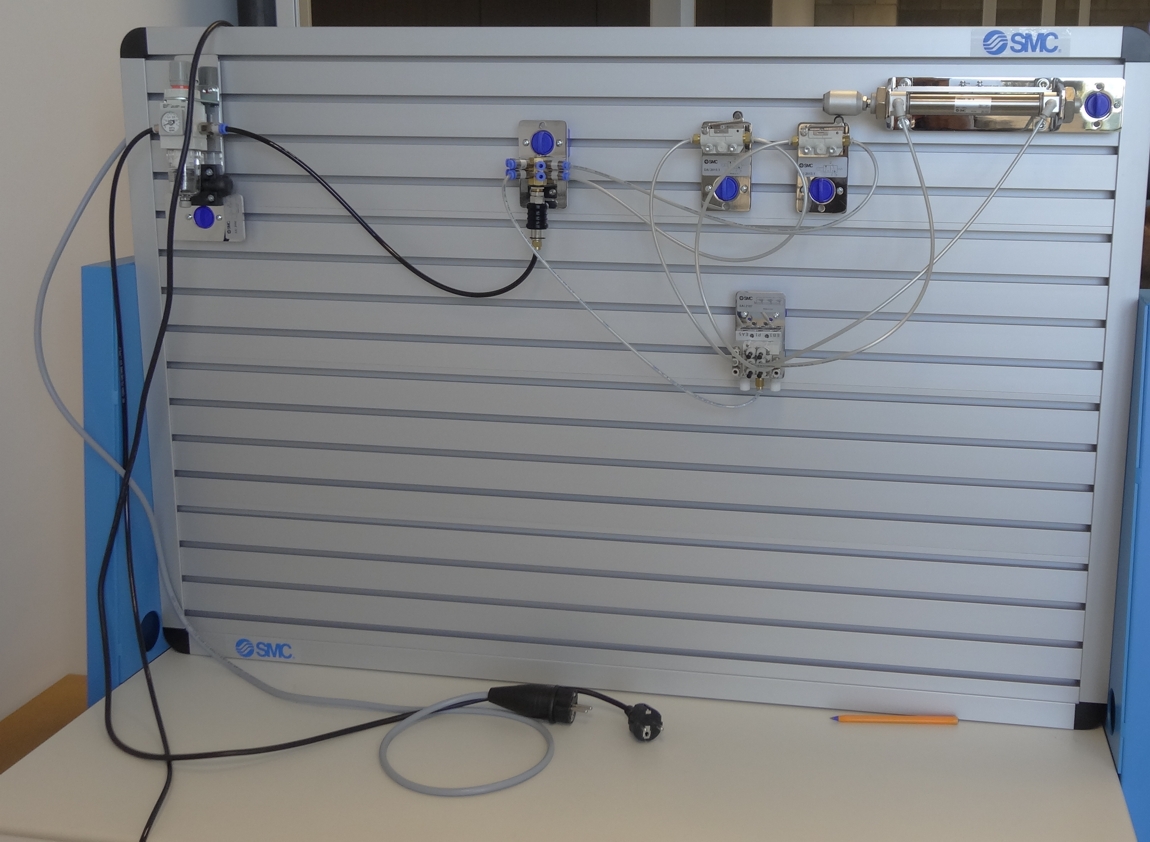
Stanowisko pomiarowe do badania układów pneumatyki i elektropneumatyki (firma SMC)
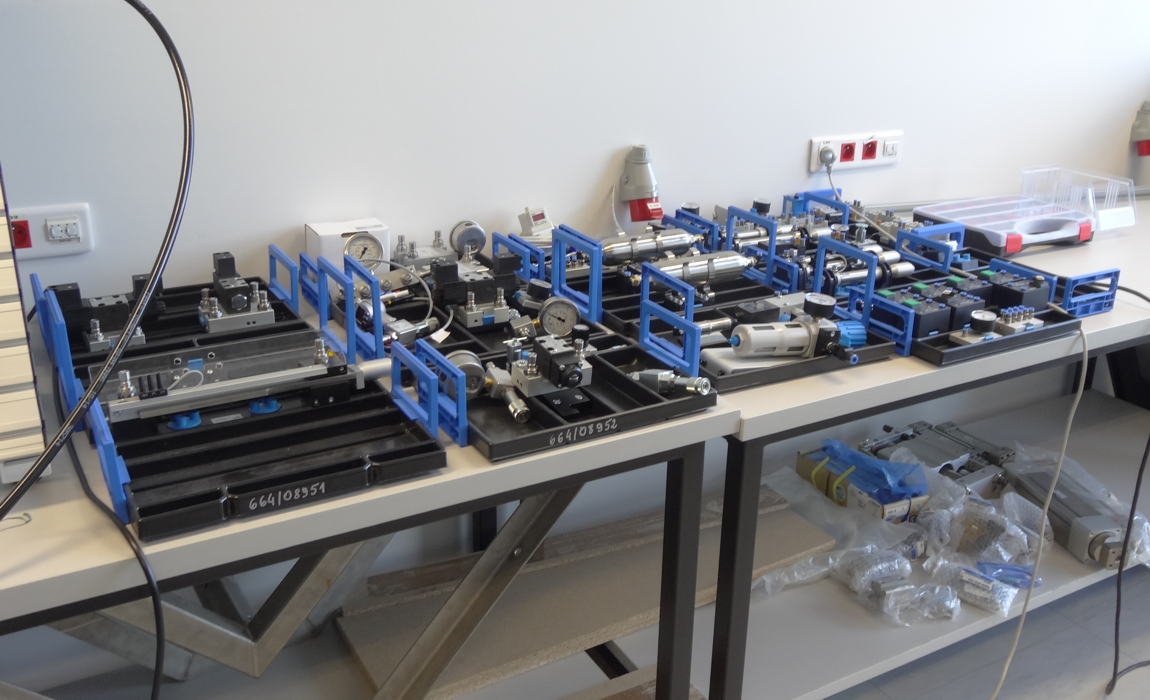
Organizery z elementami składowymi hydrauliki i elektrohydrauliki
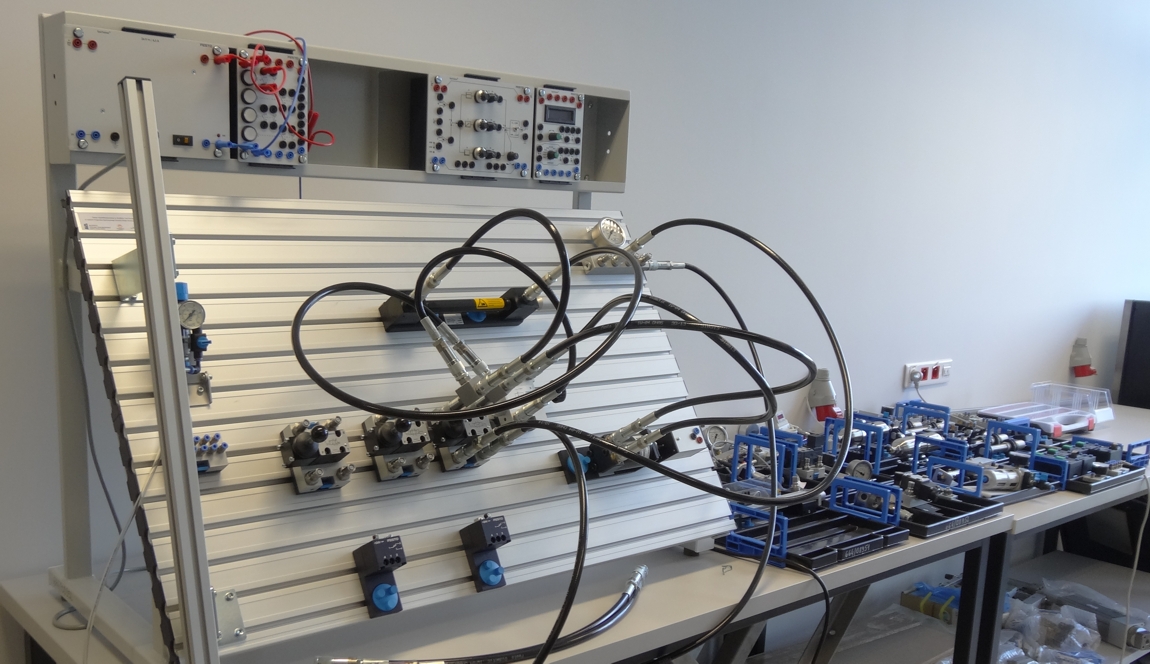
Przykładowy układ sterowania siłownikiem hydraulicznym 2-stronnego działania
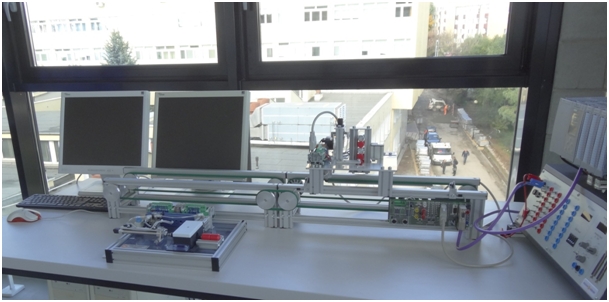
Stanowisko z 3-osiowym manipulatorem kartezjańskim o napędzie elektrycznym. Umożliwia zapoznanie z podstawami budowy, sterowania, programowania i realizacji ruchu tego typu układów z uwzględnieniem elementów zabezpieczenia strefy roboczej.
Przeznaczone jest do symulacji realizacji zadań przeładunkowych oraz pozycjonowania elementów w operacjach przenoszenia, układania, składowania (np. magazyny powierzchniowe).
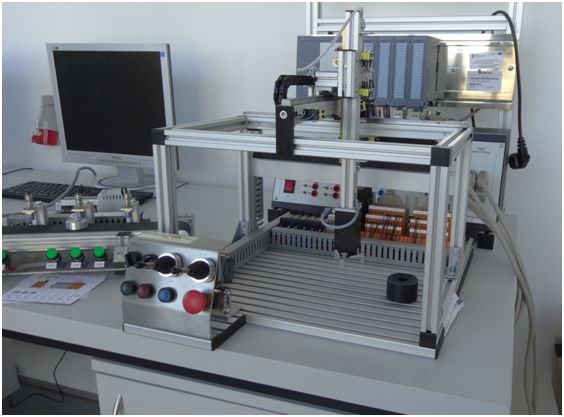
Wygląd ogólny stanowiska manipulatora kartezjańskiego
Oprogramowanie umożliwia tworzenie, programowanie i symulację systemów automatyki z użyciem najpopularniejszych technologii dostępnych w przemyśle. Komunikacja ze sterownikami PLC czy symulatorami odbywa się za pomocą dedykowanych sterowników. Oprogramowanie można podłączyć do większości sterowników PLC za pomocą modułu sygnałowego Advantech USB 4750 i sterownika ADVANTECH USB 4750 - można się bezpośrednio połączyć ze sterownikiem za pomocą protokołu TCP/IP wykorzystując sterownik I/O Siemens S7-1200 TCP/IP, S7-1500 TCP/IP.
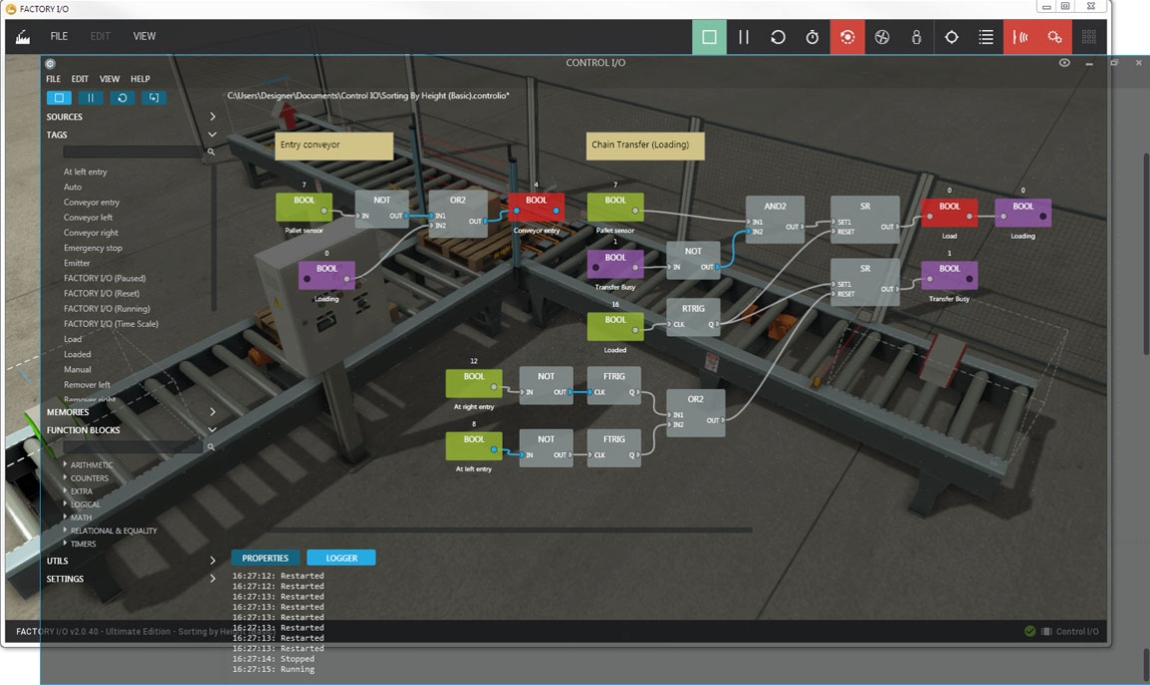
Widok ekranu oprogramowania Factory I/O
Stanowisko do demontażu obrabianych w systemie przedmiotów. Przedmiot obrabiany jest mocowany za pomocą siłownika pneumatycznego, a następnie kolejny cylinder pneumatyczny przesuwa śrubę. Zdemontowane części są następnie umieszczane w miejscu składowania.
Możliwość integracji z Robotem KAWASAKI RS03N z płytą montażową i systemem wizyjnym oraz sterowniki Siemens S7-1200 i S7-1500. Całość programowana jest poprzez sterownik S7-1500
Główna jednostka robocza bez przenośników procesowych
Robot KAWASAKI RS03N z płytą montażową i systemem wizyjnym
Stanowisko stacji obróbczej umożliwia modelowanie systemów produkcyjnych o różnej złożoności. Stanowisko jest systemem modułowym, który może być konfigurowany w trzech układach wykonawczych co zapewnia możliwość praktycznej nauki programowania z ukierunkowaniem na konkretny proces produkcyjny.
Elementy stacji obróbczej:
Główna jednostka robocza bez przenośników procesowych
Główna jednostka robocza bez przenośników procesowych
Stanowisko projektowania graficznego oraz wizualizacji wyposażone jest w dwa skanery 3D firmy Artec – model Eva przeznaczony do skanowania przedmiotów wielogabarytowych oraz model Spider wykorzystywany podczas odwzorowywania elementów o mniejszych gabarytach. Ponadto wyposażenie stanowiska stanowi oprogramowanie robocze Artec Studio oraz 3D-Doctor.
Wykaz podstawowych urządzeń wchodzących w skład stanowiska
Skanery Artec Spider oraz ArtecEva są sprzętem potrzebnym tam, gdzie bardzo ważny jest szczegółowy pomiar i dokładność wyników. Dzięki wysokiej jakości skanowania i zaawansowanej architekturze sprzętowej skanery mogą być z powodzeniem wykorzystywany przez użytkowników CAD, projektantów i inżynierów w wizualizacji, projektowaniu graficznym, przemyśle samochodowym i medycznym, inżynierii odwrotnej, produkcji masowej i kontroli jakości.
Dedykowane oprogramowanie Artec Studio pozwala na dokładną analizę oraz obróbkę trzymanych modeli 3D, zaś 3D-Doctor jest zawansowanym narzędziem modelowania 3D znajdującym zastosowanie głównie w medycynie oraz naukach pokrewnych.

Skanery 3D –Artec Eva oraz Artec Spider

Artec Eva oraz Artec Spider z oprogramowaniem roboczym
Drukarka 3D uPrint SE Plus obejmuje dwa systemy szybkiego prototypowania, przeznaczone dla uczelni, biur projektowych oraz konstrukcyjnych. Drukarka pracuję w technologii Fused Deposition Modeling (FDM) i wykorzystują dostosowany do nich materiał ABS plus
Wykaz podstawowych urządzeń wchodzących w skład stanowiska
Seria drukarek 3D uPrint SE obejmuje dwa systemy szybkiego prototypowania, przeznaczone dla uczelni, biur projektowych oraz konstrukcyjnych. Drukarka 3D Sprint SE Plus pracuje w technologii Fused Deposition Modeling (FDM) i wykorzystują dostosowany do nich materiał ABSplus. Drukarka uPrint SE Plus charakteryzuję się większą komorą roboczą, możliwością wyboru grubości nakładanej warstwy oraz ilością dostępnych kolorów materiału. Możliwość wyboru grubości warstwy wpływa także na szybkość budowania modelu. Drukarki 3D mają zautomatyzowaną obsługę, dzięki czemu nie wymagają stałego nadzoru operatora i mogą pracować w nocy lub w dni wolne od pracy.
Korzyści pracy z systemem uPrint SE Plus

Drukarka 3D uPrint wraz z oprzyżądowaniem
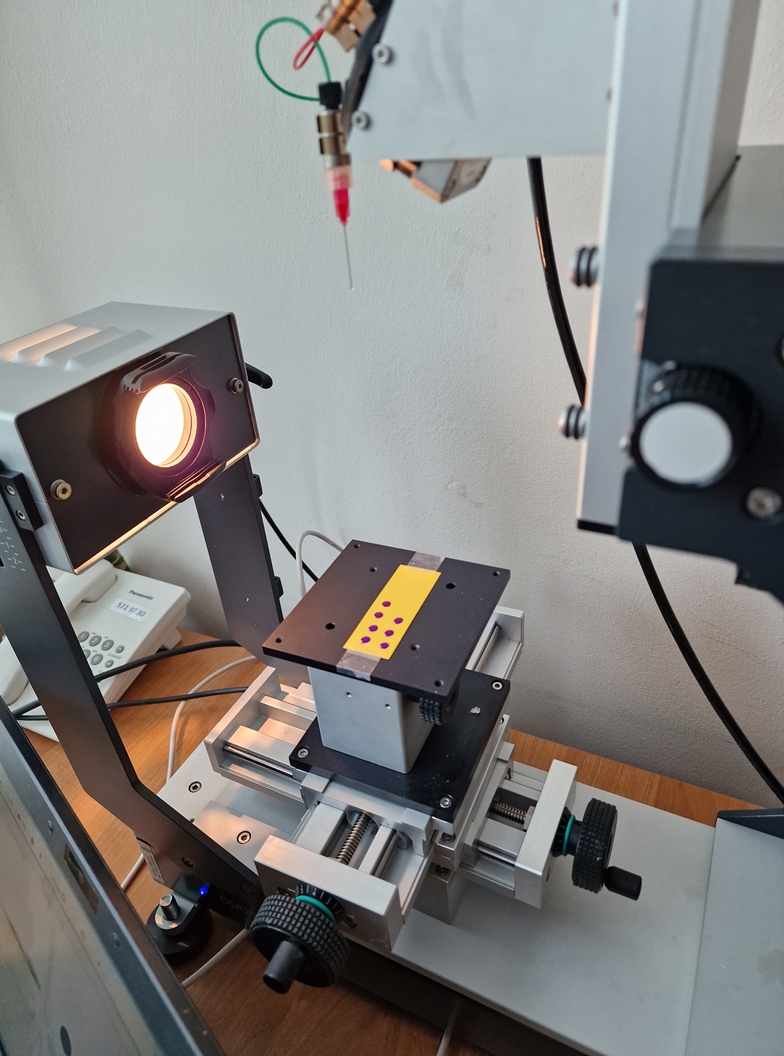
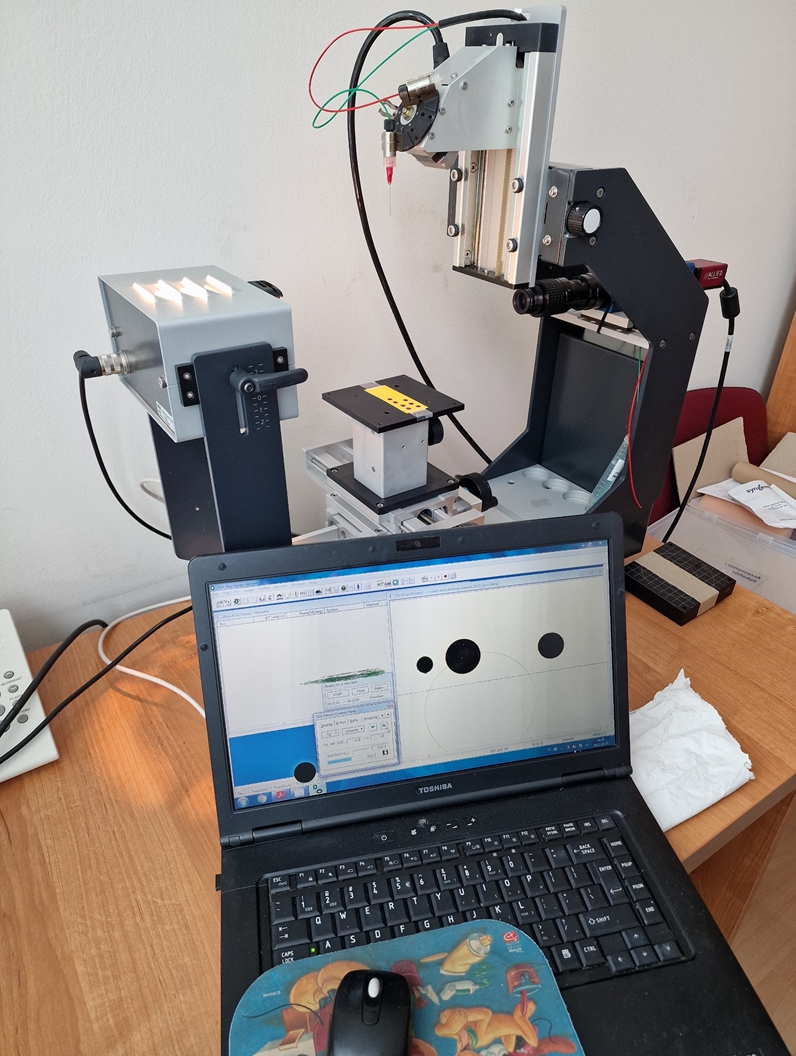
Analizator właściwości powierzchniowych działający w oparciu o analizę kształtu kropli DSA30 jest przeznaczona do półautomatycznego pomiaru statycznego i dynamicznego kąta zwilżania oraz zaawansowanej oceny zwilżalności za pomocą swobodnej energii powierzchniowej (SFE). Przyrząd umożliwia również pomiar napięcia powierzchniowego cieczy (IFT). Wyposażany jest w dodatkowe akcesoria które pozwalają na prowadzenie zautomatyzowanego pomiaru SFE, pracy adhezji oraz wyznaczanie krzywej zwilżania również w podwyższonych temperaturach. Dzięki swojej funkcjonalności może być wykorzystywany w procesie oceny stanu przygotowania powierzchni do klejenia, malowania czy też nanoszenia powłok. Pozwala też na badanie parametrów cieczy w tym napięcia międzyfazowego w oparciu o analizę geometrii wiszącej kropli.
Budowa urządzenia:
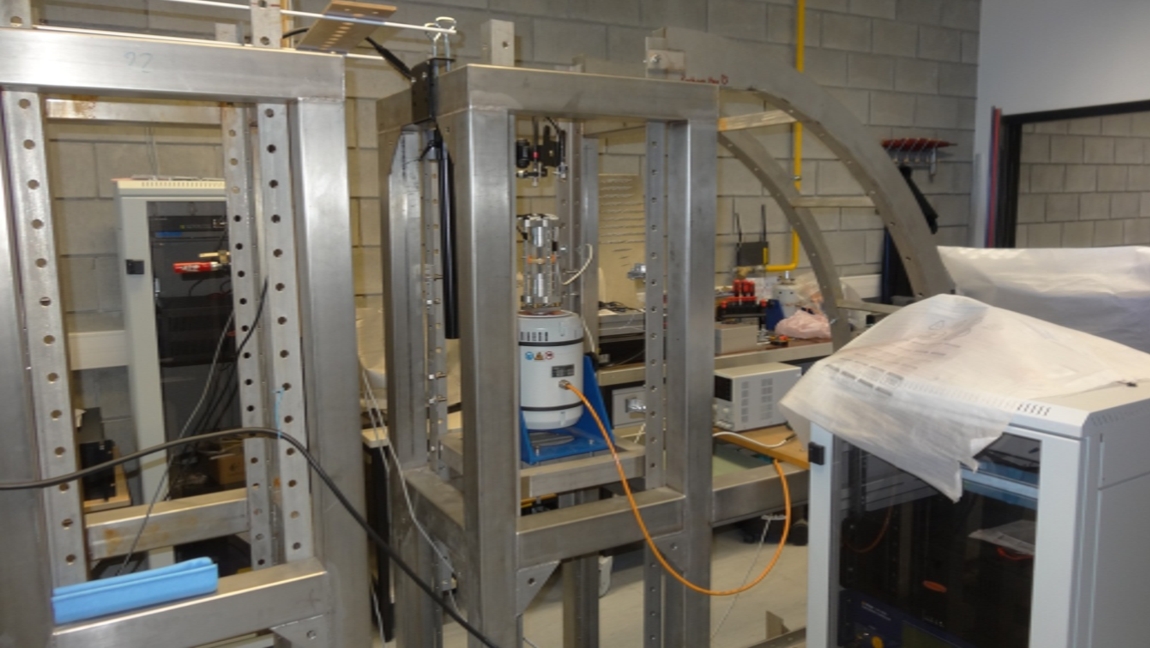
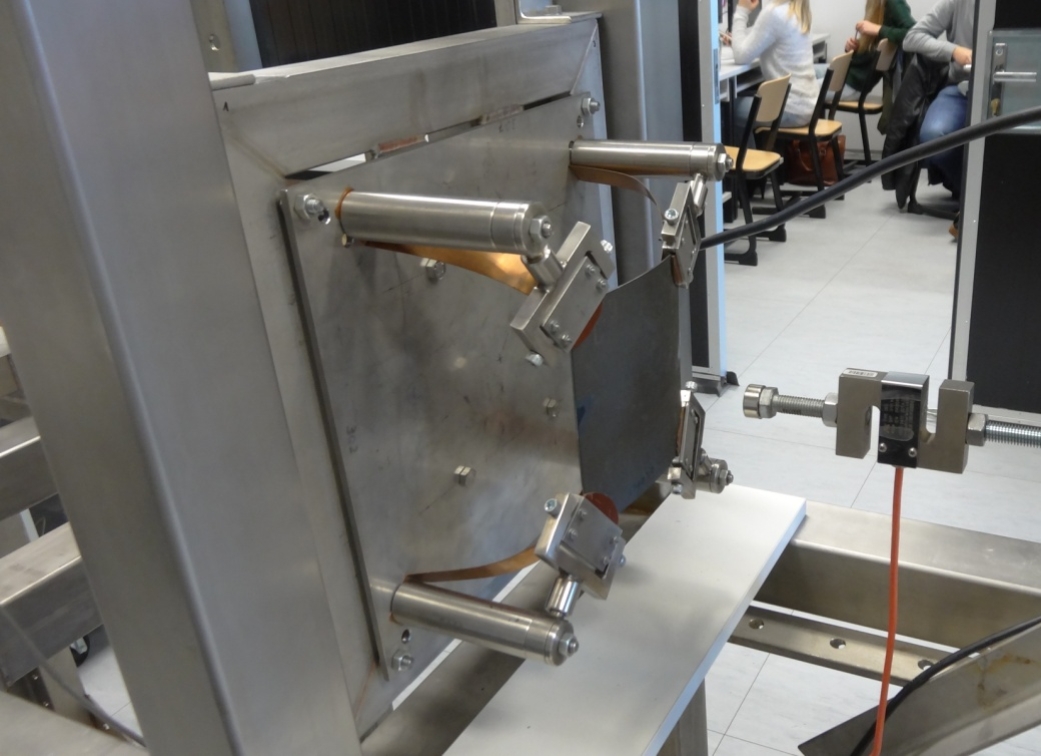
Stanowisko zawiera uniwersalny dynamiczny system do badań wytrzymałościowych dla obciążeń osiowych ±25 kN i skrętnych +/-100 Nm z komorą temperaturową MTS Bionix – Servohydraulic Test System.
System do badań wytrzymałościowych i jakościowych połączeń adhezyjnych zapewnia możliwość prowadzenia następujących badań:


Ogólny wygląd stanowiska laboratoryjnego (maszyna wytrzymałościowa MTS Bionix – Servohydraulic Test System)
EZ-Test-LX jest jednokolumnową maszyną wytrzymałościową przeznaczoną do testów wytrzymałości na rozciąganie, ściskanie oraz zginanie z wysoką szybkością próbkowania (1000 Hz). Posiada szeroki zakres głowic pomiarowych siły (od 1 N do 500N (z możliwością rozbudowy do 5kN) w klasie 0,5 i 1) oraz wysoką przestrzeń badawczą (920 mm). Jest rozwiązaniem do nisko-obciążeniowych testów mechanicznych różnych materiałów od papieru, poprzez tworzywa, aż do kompozytów. Maszyna dzięki pozwala na prowadzenie uniwersalnych badań zrywania, ściskania, zginania i innych. Sterowanie maszyną umożliwia zewnętrzny panel sterujący, a dołączone oprogramowanie Trapezium wraz z komputerem sterującym pozwala na dowolne programowanie zaawansowanych metod badawczych w oparciu o standardy międzynarodowe jak i procedury własne użytkownika.
Parametry:



Stanowisko jest przeznaczone do pomiaru drgań układów mechanicznych i hybrydowych, w których mechaniczne oscylatory są sprzężone z podukładami różnych pól fizycznych, takich jak: magnetyczne, elektryczne czy elektromagnetyczne. Stanowisko jest wyposażone w trzy niezależne mobilne zestawy pomiarowe umożliwiające realizację pomiarów w różnych punktach laboratorium oraz w lokalizacjach zewnętrznych. W każdym zestawie zamontowany jest komputer z wbudowanymi kartami pomiarowymi, zasilacze oraz akumulatorowy system podtrzymania zasilania. W zależności od przeznaczenia, zestawy wyposażone są we wzmacniacz wzbudnika drgań, kontroler wibrometru laserowego, lub zestaw szybkich kamer cyfrowych z reflektorami doświetlającymi.
Badane są zjawiska nieliniowe występujące w pobudzanych układach, sprzężenia pomiędzy współpracującymi podukładami oraz efektywność pozyskiwania energii w różnych konfiguracjach eksperymentalnych. Z powodu różnorodności zjawisk występujących w nieliniowych hybrydowych układach podczas ich pobudzania, stanowisko jest wyposażone w szereg specjalistycznych sond i urządzeń pomiarowe.
Sprzęt komputerowy oraz oprogramowanie umożliwiają szybką analizę danych eksperymentalnych oraz wykonywanie obliczeń numerycznych i symulacji komputerowych.
Prace naukowo-badawcze koncentrują się wokół badania nieliniowych hybrydowych układów mechanicznych, pozyskujących energię a drgań mechanicznych. Badane są układy z aktywnymi elementami elektroma-gnetycznymi, magnetycznymi, piezoelektrycznymi i magnetostrykcyjnymi. Badany jest wpływ nieliniowości oraz pobudzania szumowego na efektywność procesu pozyskiwania energii. Poza tym wyznacza się charakterystyki materiałów i struktur (np. płyt bistabilnych) oraz histerezę występującą w badanych zjawiskach i materiałach.

Stanowisko do badania dynamiki drgań układów

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego, Program Operacyjny Wiedza Edukacja Rozwój 2014-2020 "PL2022 - Zintegrowany Program Rozwoju Politechniki Lubelskiej" POWR.03.05.00-00-Z036/17